Dela med sig:



Colinear System och Exempel
den kolinära vektorer De är en av de tre typerna av befintliga vektorer. Det handlar om de vektorer som ligger i samma riktning eller handlingslinje. Detta betyder följande: Två eller flera vektorer kommer att vara kollinära om de är ordnade i raka linjer som är parallella med varandra.
En vektor definieras som en kvantitet applicerad på en kropp och kännetecknas av att den har en riktning, en känsla och en skala. Vektorerna kan hittas i planet eller i rymden och kan vara av olika slag: kolinära vektorer, samtidiga vektorer och parallella vektorer.
index
- 1 kolinala vektorer
- 2 egenskaper
- 2.1 Exempel 1
- 2.2 Exempel 2
- 2,3 Exempel 1
- 3 kollinärt vektorsystem
- 3.1 Collinära vektorer med motsatta sinnen
- 3.2 Collinära vektorer med samma mening
- 3.3 Collinära vektorer med lika storheter och motsatta sinnen
- 4 Skillnad mellan kolinära och samtidiga vektorer
- 5 referenser
Collinära vektorer
Vektorerna är kolinära om en verkningslinje är exakt samma verksamhetslinje för alla andra vektorer oavsett storlek och känsla för vart och ett av vektorerna.
Vektorer används som representationer i olika områden som matematik, fysik, algebra och även i geometri, där vektorer endast är kollinära när deras riktning är densamma, oavsett om deras mening inte är.
särdrag
- Två eller flera vektorer är kolinära om förhållandet mellan koordinaterna är lika.
Exempel 1
Vi har vektorerna m = m_x; m_y och n = n_x; n_y. Dessa är kollinära om:

Exempel 2

- Två eller flera vektorer är kollinära om produkten eller vektormultiplikationen är lika med noll (0). Detta beror på att i varje koordinatsystem kännetecknas varje vektor av sina respektive koordinater, och om dessa är proportionella mot varandra kommer vektorerna att vara kollinära. Detta uttrycks som följer:

Exempel 1
Vi har vektorerna a = (10, 5) och b = (6, 3). För att bestämma om de är kollinära tillämpas determinantteori, vilket fastställer jämlikhet mellan korsprodukter. På så sätt måste du:

Kolinärt vektorsystem
De kolinjära vektorer är plottade med användning av riktning och känsla av dessa med tanke på att de måste passera genom punkten av applikations- och modulen, en viss längd skala eller.
Systemet med kollinära vektorer bildas när två eller flera vektorer verkar på ett föremål eller en kropp som representerar en kraft och verkar i samma riktning.
Till exempel, om två kollinära krafter appliceras på en kropp, kommer resultatet av dessa endast att bero på den riktning i vilken de verkar. Det finns tre fall som är:
Collinära vektorer med motsatta sinnen
Resultatet av två kollinära vektorer är lika med summan av dessa:
R = Σ F = F1 + F2.
exempel
Om två styrkor verkar på en vagn F1 = 40 N och F2 = 20 N i motsatt riktning (som visas på bilden) är resultatet:
R = ΣF = (- 40 N) + 20N.
R = -20 N.

Collinära vektorer med samma känsla
Storleken på den resulterande kraften kommer att vara lika med summan av de kollinära vektorerna:
R = Σ F = F1 + F2.
exempel
Om två styrkor verkar på en vagn F1 = 35 N och F2 = 55 N i samma riktning (som visas i bilden), är resultatet:
R = ΣF = 35 N + 55N.
R = 90 N.

Det positiva resultatet indikerar att kollinära vektorer verkar åt vänster.
Collinära vektorer med lika storheter och motsatta sinnen
Resultatet av de två kollinära vektorerna är lika med summan av de kollinära vektorerna:
R = Σ F = F1 + F2.
Eftersom krafterna har samma magnitud men i motsatt riktning-det är en positiv och den andra negativa - när de två krafterna läggs till kommer den resulterande att vara lika med noll.
exempel
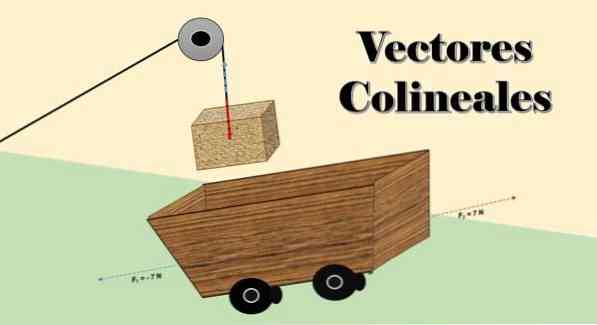
Om två styrkor verkar på en vagn F1 = -7 N och F2 = 7 N, som har samma storlek men i motsatt riktning (som visas i bilden), är resultatet:
R = ΣF = (-7N) + 7N.
R = 0.

Eftersom resultatet är lika med 0 betyder det att vektorerna är balanserade mot varandra och därför är kroppen i jämvikt eller i vila (det kommer inte att röra sig).
Skillnad mellan kolinära och samtidiga vektorer
Collinära vektorer kännetecknas av att de har samma riktning på samma linje, eller eftersom de är parallella med en linje; det vill säga de är vektorer direkt parallella linjer.
Å andra sidan definieras de samtidiga vektorerna eftersom de befinner sig i olika handlingslinjer som avlyssnas i en enda punkt.
Med andra ord har de samma utgångspunkt eller ankomst - oavsett deras modul, riktning eller riktning - och bildar en vinkel mellan dem.
Systemen för samtidiga vektorer löses genom matematiska metoder eller grafer, som är metoden för krafts parallellogram och metoden för krafts polygon. Genom dessa kommer värdet av en resulterande vektor att bestämmas, vilket indikerar den riktning i vilken en kropp kommer att röra sig.
I grund och botten är den huvudsakliga skillnaden mellan kolinära vektorer och de samtidiga vektorerna den aktionslinje som de verkar i. De kolinära som verkar i samma linje, medan de samtidiga i olika.
Det vill säga, de kollinära vektorerna verkar i ett enda plan, "X" eller "Y"; och samtidig handling i båda planen, från samma punkt.
De kollinära vektorerna är inte i en punkt, liksom de samtidiga, eftersom de är parallella med varandra.

I den vänstra bilden kan du se ett block. Den är knuten med ett rep och knuten delar den i två; När man drar mot olika orienteringar och med olika krafter kommer blocket att röra sig i samma riktning.
Två vektorer representeras som överensstämmer med en punkt (blocket), oavsett deras modul, sinne eller riktning.
Istället visas i den rätta bilden en remskiva som lyfter en låda. Repet representerar handlingslinjen; När det dras, verkar två krafter (vektorer) på den: en spänningskraft (när man klättrar blocket) och en annan kraft, den som utövar vikten av blocket. Båda har samma riktning men i motsatta riktningar; håller inte med i en punkt.
referenser
- Estalella, J.J. (1988). Vektoranalys. Volym 1.
- Gupta, A. (s.f.). Tata McGraw-Hill Education.
- Jin Ho Kwak, S.H. (2015). Linjär algebra. Springer Science & Business Media.
- Montiel, H.P. (2000). Fysik 1 för Teknisk Baccalaureat. Patria Editorial Group.
- Santiago Burbano de Ercilla, C.G. (2003). Allmän fysik Redaktionell Tebar.
- Sinha, K. (s.f.). En textbok av matematik XII Vol. 2. Rastogi Publikationer.