Dela med sig:



3 System av linjära ekvationer och hur man löser dem
den linjära ekvationer de är polynom ekvationer med en eller flera okända. I det här fallet är de okända inte upphöjda till makten, och de multipliceras inte med varandra (i det här fallet sägs att ekvationen är av grad 1 eller av första examen).
En ekvation är en matematisk jämlikhet där det finns ett eller flera av ett okänt element som vi kommer att kalla okända eller okända om det finns mer än en. För att lösa denna ekvation är det nödvändigt att ta reda på värdet av de okända.
En linjär ekvation har följande struktur:
till0· 1 + a1· X1+ till2· X2+... + an· Xn= b
Var till0, till1, till2,..., an är reella tal som vi känner till deras värde och kallas koefficienter, b är också ett känt realt tal som kallas fristående term. Och äntligen är de X1, X2,..., Xn som är så kallade okända. Dessa är variabler vars värde är okänt.
Ett system med linjära ekvationer är en uppsättning linjära ekvationer där värdet av de okända är detsamma i varje ekvation.
Logiskt sätt är sättet att lösa ett system av linjära ekvationer tilldela värden till de okända, så att jämlikheten kan verifieras. Det vill säga, de okända måste beräknas så att alla ekvationer i systemet uppfylls samtidigt. Vi representerar ett system av linjära ekvationer enligt följande
till0· 1 + a1· X1 + till2· X2 +... + an· Xn = an + 1
b0· 1 + b1· X1 + b2· X2 +... + bn· Xn = bn + 1
c0· 1 + c1· X1 + c2· X2 +... + cn· Xn = cn + 1
... .
d0· 1 + d1· X1 + d2· X2 +... + dn· Xn = dn + 1
där a0, till1,..., an,b0,b1,..., bn ,c0 ,c1,..., cn etc oss reella tal och de okända att lösa är X0,..., Xn ,Xn + 1.
Varje linjär ekvation representerar en linje och därför representerar ett system med ekvationer av N linjära ekvationer N rakt ritad i rymden.
Beroende på antalet okända som varje linjär ekvation har, kommer linjen som representerar nämnda ekvation att representeras i en annan dimension, det vill säga en ekvation med två okända (till exempel 2 · X1 + X2 = 0) representerar en linje i ett tvådimensionellt utrymme, en ekvation med tre okända (till exempel 2 · X1 + X2 - 5 · X3 = 10) skulle representeras i ett tredimensionellt utrymme och så vidare.
När man löser ett system av ekvationer, värderas X0,..., Xn ,Xn + 1 råkar vara snittpunkterna mellan linjerna.
Genom att lösa ett system av ekvationer kan vi nå olika slutsatser. Beroende på vilken typ av resultat vi erhåller kan vi skilja mellan 3 typer av system av linjära ekvationer:
1- Ubestämd kompatibilitet
Även om det kan låta som ett skämt, är det möjligt att vi, när vi försöker lösa ekvationssystemet, kommer fram till en uppenbarhet av stilen 0 = 0.
Denna typ av situation uppstår när det finns oändliga lösningar för ekvationssystemet, och det här inträffar när det visar sig att i vårt system av ekvationer representerar ekvationerna samma rad. Vi kan se det grafiskt:
Som ett system av ekvationer tar vi:
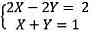
Genom att ha 2 ekvationer med 2 okända att lösa kan vi representera linjerna i ett tvådimensionellt plan
Eftersom vi kan se linjerna med samma, så sammanfaller alla punkter i den första ekvationen med de andra ekvationspunkterna, därför har den lika många punkter som punkter som linjen har, det vill säga oändligheter.
2- Inkompatibel
När vi läser namnet kan vi föreställa oss att vårt nästa ekvationssystem inte kommer att få en lösning.
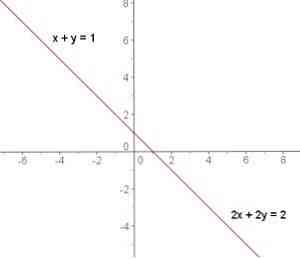
Om vi försöker lösa till exempel detta system av ekvationer
Grafiskt skulle det vara:
Om vi multiplicerar alla villkor i den andra ekvationen får vi att X + Y = 1 är lika med 2 · X + 2 · Y = 2. Och om det här sista uttrycket subtraheras från den första ekvationen får vi
2 · X-2 · X + 2 · Y-2 · Y = 3-2
Eller vad är detsamma
0 = 1
När vi befinner oss i denna situation betyder det att linjerna som representeras i ekvationssystemet är parallella, vilket innebär att de per definition aldrig skärs och det finns ingen skärpedjup. När ett system presenteras på detta sätt sägs det vara inkonsekvent oberoende.
3- Bestämt stöd
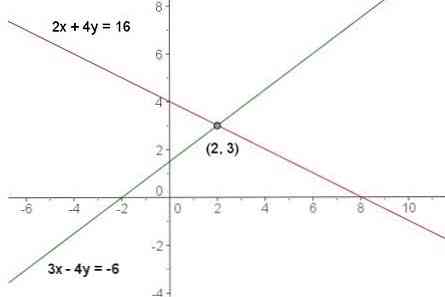
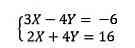
Slutligen kommer vi till det fall där vårt system av ekvationer har en enda lösning, det fall där vi har linjer som skär och bildar en skärningspunkt. Låt oss se ett exempel:
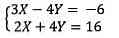
För att lösa det kan vi lägga till de två ekvationerna så att vi får
(3 · X-4 · Y) + (2 · X + 4 · Y) = -6 + 16
Om vi förenklar vi har lämnat
5 · X + 0 · Y = 5 · X = 10
Från vilken vi lätt avleder den X = 2 och ersätter eller X = 2 i någon av de ursprungliga ekvationerna erhåller vi Y = 3.
Visuellt skulle det vara:
Metoder för att lösa system av linjära ekvationer
Som vi har sett i föregående avsnitt, för system med 2 okända och 2 ekvationer, baserade på enkla funktioner som tillägg, subtraktion, multiplikation, delning och substitution, kan vi lösa dem på några minuter. Men om vi försöker tillämpa denna metodik på system med fler ekvationer och fler okända, blir beräkningarna krångliga och vi kan enkelt fel.
För att förenkla beräkningarna finns flera lösningsmetoder, men utan tvekan är de mest utbredda metoderna Cramer's Rule och Elimination of Gauss-Jordan..
Cramer metod
För att förklara hur denna metod tillämpas är det viktigt att veta vad som är dess matris och vet hur man hittar dess determinant, låt oss göra en parentes för att definiera dessa två begrepp.
en matris Det är inget annat än en uppsättning tal eller algebraiska symboler placerade i horisontella och vertikala linjer och arrangerade i form av en rektangel. För vårt tema använder vi matrisen som ett mer förenklat sätt att uttrycka vårt system av ekvationer.
Låt oss se ett exempel:
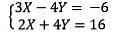
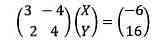
Det kommer att vara systemet med linjära ekvationer
Detta enkla system av ekvationer vi kan sammanfatta är driften av två 2 × 2 matriser som resulterar i en 2 × 1 matris.
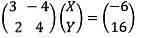
Den första matrisen motsvarar alla koefficienter, den andra matrisen är de okända att lösa och matrisen belägen efter likheten identifieras med de oberoende termerna av ekvationerna
den determinant är en operation som appliceras på en matris vars resultat är ett reellt tal.
När det gäller matrisen som vi har hittat i vårt tidigare exempel skulle dess determinant vara:

När begreppen matris och determinant har definierats kan vi förklara vad Cramer-metoden består av.
Med denna metod kan vi enkelt lösa ett system av linjära ekvationer så länge som systemet inte överskrider de tre ekvationerna med tre okända eftersom beräkningen av determinanterna för en matris är mycket svår för matriser på 4 × 4 eller högre. I fallet med ett system med mer än tre linjära ekvationer rekommenderas metoden genom eliminering av Gauss-Jordanien.
Fortsatt med föregående exempel, med hjälp av Cramer behöver vi helt enkelt beräkna två determinanter och med det kommer vi att hitta värdet av våra två okända.
Vi har vårt system:
Och vi har ett system representerat av matriser:
Värdet av X finns:
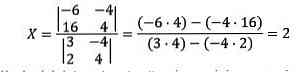
Bara i beräkningen av determinanten som finns i nämnaren i divisionen har vi ersatt den första kommunen för matrisen av oberoende termer. Och i nämnaren av divisionen har vi bestämningen av vår ursprungliga matris.
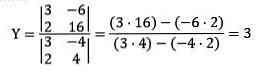
Utföra samma beräkningar för att hitta Y vi erhåller:
Eliminering av Gauss-Jordanien
Vi definierar utvidgad matris till matrisen som härrör från ett system av ekvationer där vi lägger till de oberoende termerna i slutet av matrisen.
Metoden genom att eliminera Gauss-Jordanien består av operationer mellan raderna av matrisen för att omvandla vår utvidgade matris till en mycket enklare matris där jag har nollor i alla fält utom i diagonalen, där jag måste erhålla några. Som följer:

Där X och Y skulle vara reella tal som motsvarar våra okända.
Låt oss lösa detta system genom att eliminera Gauss-Jordanien:



Vi har redan lyckats få en noll i den nedre vänstra delen av vår matris, nästa steg är att få en 0 i den övre högra delen av den.


Vi har uppnått 0 i den övre vänstra delen av matrisen, nu behöver vi bara konvertera diagonalen till dem och vi har redan löst vårt system av Gauss-Jordanien.
Därför kommer vi till slutsatsen att

referenser
- vitutor.com.
- algebra.us.es.
- System av linjära ekvationer (utan datum). Återställd från uco.es.
- System av linjära ekvationer. Kapitel 7. (undated). Hämtad från sauce.pntic.mec.es.
- Linjär algebra och geometri (2010/2011). System av linjära ekvationer. Kapitel 1. Institutionen för algebra. University of Seville. Spanien. Återställd från algebra.us.es.